Sistema de Auxílio de Mira
Clique Aqui para baixar o documento.
Este documento descreve o desenvolvimento de um sistema de auxílio de mira para um drone eVTOL. O sistema foi projetado para fornecer sobreposição de informações de voo na transmissão de vídeo da câmera do drone, permitindo a exibição de dados como velocidade horizontal, velocidade vertical, altitude e uma mira baseada em cálculos de lançamento parabólico.
Arquitetura do Sistema
O sistema de auxílio de mira foi desenvolvido utilizando os seguintes componentes principais:
Componentes Principais
- Drone eVTOL: Veículo aéreo elétrico com capacidade de decolagem e pouso vertical.
- Raspberry Pi 4: Computador de borda responsável pelo processamento da câmera e exibição dos dados.
- Pixhawk: Controlador de voo que fornece dados de velocidade e altitude via MAVLink.
- GPS: Sensor de posição para determinar a altitude relativa.
- Câmera: Sensor de vídeo acoplado ao drone e conectado à Raspberry Pi via cabo flat.
- Óculos de Realidade Aumentada: Dispositivo para exibição do feed de vídeo com sobreposição de dados.
Fluxo de dados
- A câmera captura o vídeo em tempo real.
- A Raspberry Pi processa o vídeo e sobrepõe informações de voo.
- Os dados de velocidade horizontal e vertical são lidos da Pixhawk via protocolo MAVLink.
- A altitude relativa é obtida a partir do GPS.
- Uma mira é renderizada na tela, ajustada com base em um modelo simples de lançamento parabólico.
- Um servidor web transmite o vídeo processado para diferentes dispositivos, incluindo os óculos de realidade aumentada.
Protocolo MAVLink
O MAVLink é um protocolo de mensagens leve projetado para a comunicação entre drones e seus componentes de bordo. Ele adota um modelo híbrido de comunicação, combinando publicação-assinatura e comunicação ponto a ponto. Os fluxos de dados são transmitidos como tópicos, enquanto a configuração de missões e parâmetros ocorre por meio de protocolos ponto a ponto com retransmissão.
As mensagens do MAVLink são definidas em arquivos XML, onde cada arquivo especifica um conjunto de mensagens para um sistema MAVLink específico, conhecido como dialeto. O common.xml é o conjunto de mensagens de referência utilizado pela maioria das estações de controle de solo e pilotos automáticos. A partir desses arquivos XML, geradores de código criam bibliotecas de software em diversas linguagens de programação, permitindo que drones, estações de controle e outros sistemas MAVLink se comuniquem de forma padronizada. Essas bibliotecas são geralmente licenciadas pelo MIT, o que possibilita seu uso sem restrições em aplicações proprietárias.
A implementação de referência em C é uma biblioteca altamente otimizada, funcionando apenas com cabeçalhos, sendo ideal para sistemas com memória limitada. Testada em campo, essa biblioteca é amplamente utilizada em diversos produtos, garantindo interoperabilidade entre componentes de diferentes fabricantes. O MAVLink foi criado em 2009 por Lorenz Meier e desde então tem recebido contribuições de diversos desenvolvedores.
Principais características do MAVLink:
- Alta eficiência: O MAVLink 1 adiciona apenas 8 bytes de overhead por pacote, enquanto o MAVLink 2 adiciona 14 bytes, oferecendo maior segurança e extensibilidade. Como não requer enquadramento adicional, é ideal para ambientes com largura de banda limitada.
- Alta confiabilidade: Utilizado desde 2009, o protocolo é resistente a quedas de pacotes, corrupção de dados e fornece mecanismos de autenticação de pacotes.
- Compatibilidade com várias linguagens e plataformas: Pode ser implementado em microcontroladores e sistemas operacionais diversos, como ARM7, ATMega, dsPic, STM32, Windows, Linux, MacOS, Android e iOS.
- Suporte a múltiplos sistemas: Permite a comunicação simultânea de até 255 dispositivos, incluindo drones, estações de controle terrestres e outros componentes.
- Comunicação dentro e fora do veículo: Possibilita a troca de dados tanto entre um drone e uma estação terrestre quanto entre os próprios componentes do drone, como piloto automático e câmera.
Implementação
Captura e Processamento de Vídeo
A câmera é acessada por meio do GStreamer, garantindo uma captura eficiente:

A câmera é acessada por meio do GStreamer, garantindo uma captura eficiente:

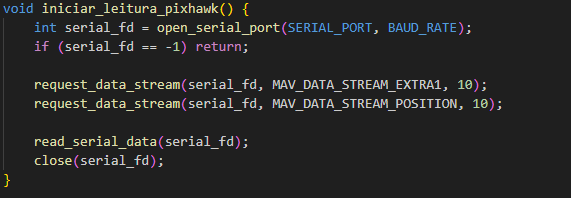
Comunicação com a Pixhawk
A Raspberry Pi se comunica com a Pixhawk por meio de UART para solicitar e receber dados MAVLink:
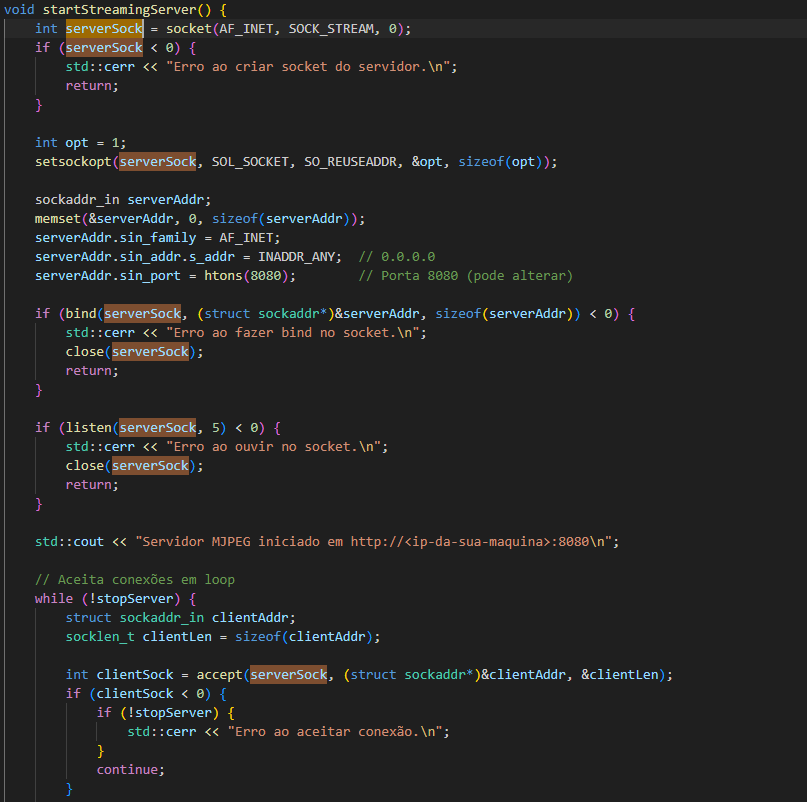
Servidor web para streaming de video
Para permitir a visualização remota do vídeo, foi implementado um servidor MJPEG:
Cada cliente conectado recebe um streaming de vídeo em formato multipart/x-mixed-replace:
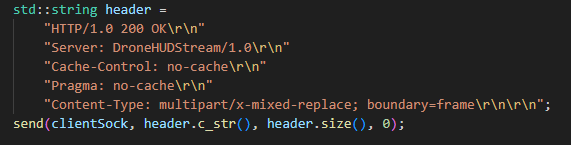
Isso permite que o vídeo seja acessado a partir de qualquer dispositivo compatível com navegadores da web ou aplicativos personalizados.
Resultados
- Aprimoramento da navegação do drone: A exibição em tempo real de velocidade e altitude melhora o controle durante operações críticas.
- Mira inteligente: O ajuste da mira com base em lançamento parabólico permite maior precisão.
- Acessibilidade em múltiplos dispositivos: A transmissão web permite que o vídeo seja visualizado remotamente, inclusive em óculos de realidade aumentada.
- Baixa latência: O processamento eficiente garante que os dados sejam sobrepostos sem atrasos perceptíveis.
Conclusão
O sistema de auxílio de mira para drone eVTOL foi implementado com sucesso, integrando captura de vídeo, processamento de imagem, comunicação com sensores e transmissão web. Ele permite uma navegação mais precisa e fornece suporte visual para aplicações avançadas, como operações de resgate e monitoramento aéreo. Além disso, a solução desenvolvida demonstra a viabilidade da sobreposição de dados em tempo real para aprimoramento da experiência operacional.
Tabela de Versionamento
| Versão | Data | Descrição | Autor(es) |
|---|---|---|---|
| 1.0 | 19/02/2025 | Criação inicial e estrutura do artefato | Vitor Rodrigues |